Amortissement d’oscillations : description du phénomène physique
Le domaine technique auquel se rapporte l’invention est le contrôle des groupes motopropulseurs électriques qu’on trouve sur les véhicules électriques ou hybrides.

Le domaine technique auquel se rapporte l’invention est le contrôle des groupes motopropulseurs électriques qu’on trouve sur les véhicules électriques ou hybrides.
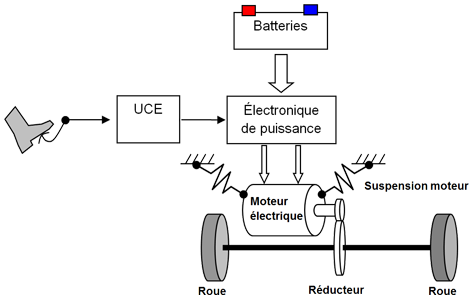
Sur un tel véhicule, le contrôle moteur électrique permet d’interpréter la volonté du conducteur (pédales d’accélérateur et de frein) en consigne de couple positive ou négative. Cette consigne de couple moteur est ensuite transmise à l’électronique de puissance (onduleur, hacheur…) qui assure l’élaboration des grandeurs de consigne électrique (tension et courant) correspondantes. Le moteur électrique assure la conversion de la puissance électrique en puissance mécanique. Et enfin le couple du moteur électrique est transmis aux roues par l’intermédiaire d’un éventuel réducteur.
Cet ensemble d’organes électromécanique qui assure la transmission du couple de consigne conducteur aux roues est appelée chaîne de traction.
Cette chaîne de traction, comme tous les systèmes physiques, est définie par un ensemble de grandeurs caractéristiques qui sont des inerties, des frottements et des raideurs auxquelles nous pouvons ajouter les temps de réactions de l’UCE (Unité de contrôle électrique, contient toutes les stratégies logicielles) et de l’électronique de puissance. Ces grandeurs définissent le comportement dynamique de la chaîne de traction. Elles impactent le comportement du véhicule lors des variations de la consigne de couple (donnée par le conducteur). Certaines configurations peuvent générer des oscillations, même pour des consignes de couple stables.
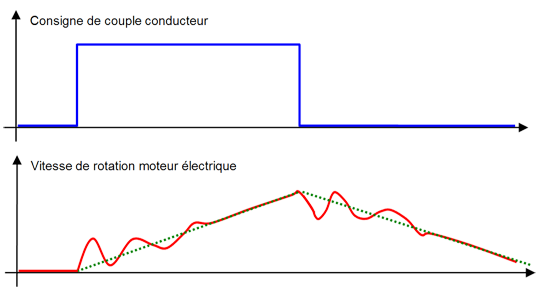
Sur ce premier exemple, nous pouvons voir l’impact du comportement réel de la chaîne de traction sur le régime moteur lors des variations de la consigne de couple conducteur. La courbe en pointillé vert décrit la réponse idéale de la chaîne de traction vis-à-vis de l’agrément de conduite pour l’utilisateur. Alors que la courbe continue rouge représente la réponse réelle du véhicule avec un comportement oscillatoire amorti. Ces oscillations sont ressenties par le conducteur et peuvent générer une gêne importante.
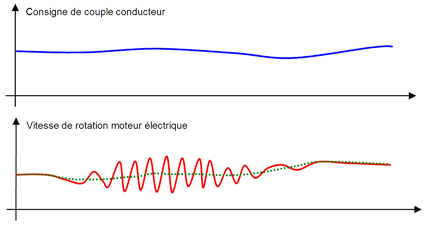
Sur ce deuxième exemple, nous pouvons voir le comportement oscillant de la chaîne de traction dans une certaine zone de régime moteur alors que la consigne de couple conducteur est stable. Ce point de fonctionnement est dans la zone de résonance de la chaîne de traction. La courbe en pointillé vert décrit la réponse idéale de la chaîne de traction et la rouge en trait plein la réponse réelle dans la zone de résonance.
Ces problèmes d’oscillations sur des changements de consigne de couple et de résonance de la chaîne de traction ne sont pas propres aux motorisations électriques. Mais dans ce cas, ces problèmes d’agrément sont fortement amplifiés par la capacité de la machine électrique à produire de très forts niveaux de couple (positif et négatif) dans un délai extrêmement court.
L’invention présentée porte sur un procédé de commande d’une chaîne de traction électrique pour véhicule électrique ou hybride qui a pour objectif d’atténuer les problèmes d’oscillations vus ci-dessus.
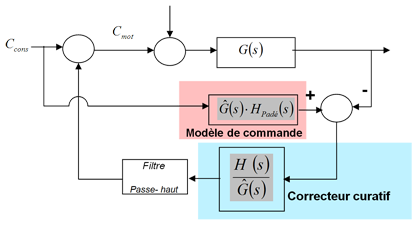
L’invention propose une nouvelle structure de correcteur par rétroaction basée sur un modèle du véhicule. Ce dernier permet de représenter le comportement du véhicule avec en entrée le couple et en sortie le régime.
Nous utilisons alors la technique d‘inversion du modèle pour définir un couple corrigé en fonction du régime moteur.
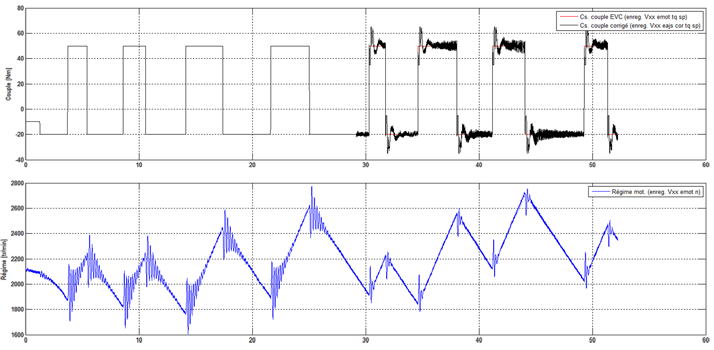
Au milieu de l’essai, le curatif est activé. Nous avons alors une consigne de couple corrigée qui permet de réduire les oscillations de régime.
Cet étude a mené à un brevet de Renault, co-signé par Acsystème.